W dzisiejszych czasach wiele różnych typów robotów znajduje zastosowanie nie tylko w przypadku chorób, powodujących wysoki stopnień niepełnosprawności, takich jak udar, choroba Parkinsona, stwardnienie rozsiane, urazy rdzenia kręgowego i urazy głowy, ale także do przeprowadzania rehabilitacji w innowacyjny, zabawny i przyjazny sposób.
Coraz częściej w dziedzinie rehabilitacji wprowadzane są technologie wspierające działalność specjalistów, lekarzy i fizjoterapeutów; przyszłość i kolejne wyzwania rehabilitacji polegają na rozwoju robotyki.
Istnieją różne kategorie robotów wspomagających rehabilitację: egzoszkielety, roboty końcowe, roboty humanoidalne i wiele innych. Koncentrując się na kategorii robotów humanoidalnych, możemy zaobserwować wykorzystanie robotów takich jak Nao, Pepper, Sanbot, Paro, Kaspar, które asystują osobom starszym, z demencją, chorobą Alzheimera lub z problemami fizycznymi, powodowanymi przez Sarkopenię, ale także z dziećmi ze spektrum zaburzeń autystycznych, chorobami nerwowo-mięśniowymi i innymi niepełnosprawnościami.
W tym artykule opiszemy dwa różne projekty prowadzone przez Scuola di Robotica, które dotyczą zastosowania dwóch różnych typów robotów humanoidalnych (Pepper i Nao) w dwóch różnych kontekstach rehabilitacji i opieki; w pierwszym przypadku porozmawiamy o robocie Pepper w roli rehabilitanta, kontrolera i demonstratora ćwiczeń z osobami cierpiącymi na Sarkopenię, w drugim zobaczymy zastosowanie humanoidalnego robota Nao jako trenera i animatora współpracującego z osobami cierpiącymi na chorobę Alzheimera.
Humanoidalny robot Pepper
Humanoidalny robot Pepper, wyprodukowany przez francuską firmę Soft Bank Robotics, jest pierwszym humanoidalnym robotem, który potrafi rozpoznawać ludzką twarz i emocje, dzięki czemu interakcja z otaczającymi go ludźmi jest jak najbardziej naturalna; jest wyposażony w tablet, kilka czujników dotykowych, lasery i kamery, które umożliwiają interakcję z otaczającym środowiskiem.
Pepper został wybrany przez Scuola di Robotica, szpital Galliera w Genui i Uniwersytet w Genui jako instruktor i rehabilitant, który poprowadzi serie ćwiczeń fizycznych z grupami osób. Są to ćwiczenia fizyczne specjalnie zaprojektowane w celu zwalczania Sarkopenii. W rozwój projekt R.O.S.A, którego częścią jest robot Pepper zaangażowane są School of Robotics, Wydział Geriatrii, Ortogeriatrii i Rehabilitacji (CUROGE) Szpitala Galliera w Genui oraz Wydziały Inżynierii (DIBRIS) oraz Architektury i Projektowania Uniwersytetu w Genui.
Terminem sarkopenii określa się postępującą utratę masy mięśniowej, której towarzyszy spadek siły i wydajności mięśni, związany z wiekiem [V. Malafarina, F. Úriz-Otano, R. Iniesta i L. Gil-Guerrero, „Sarkopenia u osób starszych: diagnostyka, fizjopatologia i leczenie”, Maturitas, tom. 71, nr 2, s. 109-114, 2012].
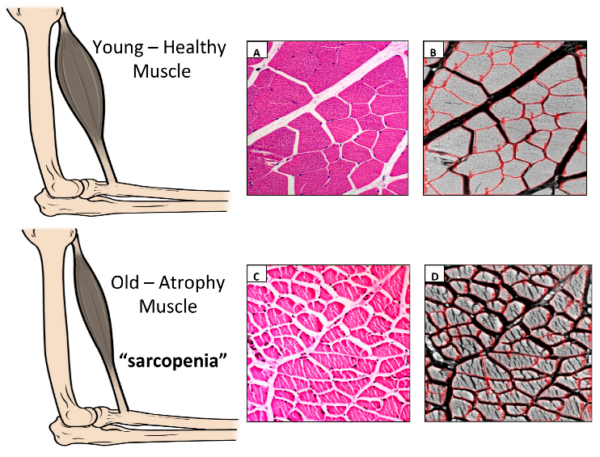
Sarkopenia to choroba, która znacznie się nasila, w korelacji z szybkim starzeniem się populacji. Badania rehabilitacyjne pokazują, że ważne jest, aby zapobiegać i przeciwdziałać jej, wykonując ćwiczenia fizyczne obejmujące kończyny górne i dolne. Tylko okresowa, stała aktywność umożliwi poprawę jakości życia, a tym samym autonomii osób starszych. Jednak chęć do podjęcia aktywności fizycznej musi pochodzić od zainteresowanych osób, bez jakiegokolwiek zewnętrznego współ zaangażowania. Badania oraz wdrażanie innowacyjnych technik profilaktyki i interwencji terapeutycznych są aktualnymi wyzwaniami ze względu na rosnącą liczbę osób dotkniętych sarkopenią i związanymi z nią powikłaniami i niepełnosprawnościami.
Dzięki wsparciu i doświadczeniu Scuola di Robotica, która prowadzi niezliczoną liczbę aktywnych projektów, które widzą zastosowanie robotów humanoidalnych w leczeniu, edukacji i hotelarstwie, w obszarach publicznych i prywatnych, projekt R.O.S.A proponuje innowacyjną metodę zapobiegania i przeciwdziałania wystąpieniu sarkopenii.
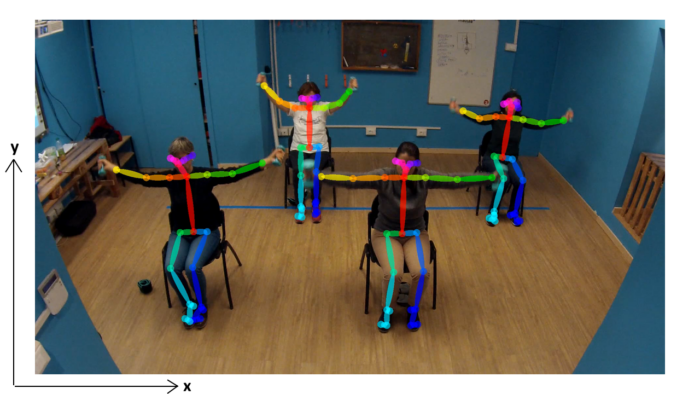
Zaproponowano konkretne ćwiczenia fizyczne, polegające na ruchu kończyn górnych i dolnych, które zamiast być wykonywane samodzielnie w domu, są wykonywane interaktywnie pod okiem humanoidalnego robota Pepper. Skupiono się na zaprojektowaniu platformy, w skład której wchodzą: humanoidalny robot do ilustrowania, demonstrowania i kontrolowania, czy grupa osób wykonuje proponowane ćwiczenia poprawnie; zewnętrzna kamera do przechwytywania wideo osób obecnych na sesji; ekran, duży, czytelny ekran, w który wyposażony jest Pepper, i który pomaga robotowi dostarczać czytelnych instrukcji graficznych, jak prawidłowo wykonywać ćwiczenia, prezentując filmy demonstracyjne doświadczonych fizjoterapeutów.

Robot został zaprogramowany tak, aby wykonywał ćwiczenia w tym samym czasie co ludzie oraz monitorował wykonanie i ewentualne zakończenie ćwiczeń, zapewniając informację zwrotną w czasie rzeczywistym podczas każdej sesji.
Aby zapewnić prawidłowe monitorowanie ruchów wykonywanych przez każdą osobę, używana jest kamera zewnętrzna, która pozyskuje dane wideo i poprzez technikę analizy bez markerów, która rekonstruuje szkielet osoby i monitoruje ruchy wszystkich stawów ciała, ocenia, czy i jak ruch został wykonany oraz zakończony.
Robot sprawdza w czasie rzeczywistym, czy wszyscy uczestnicy w pełni wykonują wszystkie wymagane ćwiczenia i zachęca uczestników, którzy przerywają lub spowalniają wykonywanie ćwiczeń.
Następnie, dzięki szczegółowej obróbce off-line nagranego podczas sesji wideo, możliwe jest uzyskanie informacji o jakości wykonania z wyróżnieniem parametrów technicznych na temat ilości wykonanych ruchów; symetrii między ruchami w prawo i w lewo; zakresu ruchu najistotniejszych stawów i synchronizacji pomiędzy różnymi podmiotami a robotem, ten ostatni parametr pozwala nam zweryfikować, czy uczestnicy postępują zgodnie z instrukcjami i tempem podanym przez robota.
Wyniki uzyskane w pierwszych sesjach eksperymentalnych platformy z osobami cierpiącymi na sarkopenię wykazały wysoki stopień akceptacji po ich stronie oraz wysoką synchronizację ruchów pomiędzy uczestnikami zajęć a robotem.
Charakterystyka robota i jego kształt okazały się odpowiednie do badania: ludzie uznali Peppera za doskonałego trenera, który potrafił pokazać im wszystkie ćwiczenia w bardzo zrozumiały sposób i w zabawny sposób poprowadzić ich do ukończenia protokołu z zachowaniem prawidłowego czasu.
Roboty humanoidalne są jednak stosowane nie tylko jako „fizjoterapeuci” w kontekście rehabilitacji i treningu fizycznego. Ostatnio w wielu przypadkach roboty humanoidalne zostały zaadoptowane ze względu na ich modułowość interakcji i mogą być wykorzystywane zarówno do zmniejszania apatii, jak i do zabawy, a także do wspomagania niektórych czynności edukacyjnych i wzmacniania pamięci.
Robot Nao
W związku z tym porozmawiajmy o drugim projekcie, w którym humanoidalny robot Nao zostanie zastosowany do osób z chorobą Alzheimera. W tym kontekście humanoidalny robot Nao jest wykorzystywany jako narzędzie rozrywkowe oraz pojazd do gier i wspomagania procesów poznawczych.
Projekt miał miejsce we Włoszech w Il Paese Ritrovato w Monza, małym miasteczku, w którym osoby z chorobą Alzheimera prowadzą normalne życie, czując się jak w domu i otrzymując niezbędną uwagę.
„Prawdziwe miejsce, które chce spowolnić spadek funkcji poznawczych i zminimalizować niepełnosprawność w codziennym życiu, oferując mieszkańcom możliwość dalszego prowadzenia bogatego życia, odpowiadającego ich zdolnościom, pragnieniom i potrzebom”.
Celem projektu było zapewnienie mieszkańcom Paese Ritrovato zajęć, zabaw, warsztatów wsparcia poznawczego oraz inteligentnych gier wykonywanych za pomocą humanoidalnego robota Nao.
Odbiorcami projektu byli mieszkańcy Il Paese Ritrovato, którzy wspólnie z operatorami, terapeutami i psychologami prowadzili różnego rodzaju zajęcia grupowe. Zajęcia obejmowały etapy zdobywania wiedzy i dialogu słownego między mieszkańcami oraz zabawy, w tym: zgadnij zwierzę, dokończ przysłowie, śpiewaj, zapamiętaj przepisy i ćwiczenia.

Pod koniec pierwszej fazy eksperymentów, jak poinformowała terapeutka Paola Perfetti, która uczestniczyła w zajęciach z mieszkańcami: „Wpływ na mieszkańców był pozytywny od momentu, gdy wyjęliśmy go z pudełka na ich oczach. Możemy określić robota jako postać bardzo miłą, tworzącą dobre samopoczucie. Nao jest w stanie pobudzić do nowych eksperymentów, nie tylko w pracy grupowej, ale także indywidualnie, jest w stanie zacieśnić relację między mieszkańcem a operatorem. Nao jest medium, emocjonalnym mediatorem. Mieszkańcy Il Paese Ritrovato odbierają zajęcia jako zabawne, a robota traktują jak człowieka, a to sprzyja interakcji”.
W dzisiejszych czasach doskonale zdajemy sobie sprawę, że wykorzystanie nowych technologii i robotów humanoidalnych do wspierania osób słabych i starszych przyniosło doskonałe wyniki i zachęca naukowców do tworzenia przyszłych zastosowań.
Sprawdź Nasze artykuły:
- Słaby zasięg internetu na wsi – przyczyny i skuteczne rozwiązania
- Jak poprawić sygnał GSM w domu?
- Jak poprawić zasięg w telefonie? Najskuteczniejsze sposoby
źródło: